秋招补一下Intel实习期间看的东西
经典的神经网络一般是最大化数据集$\mathcal{D}=(x_i,y_i)$下的最大似然$P(\mathcal{D} \mid \mathbf{w})$ ,即在网络权重为$w$时让输入$x_i$时输出$y_i$的概率最大
如果给网络权重$w$一个先验概率分布,则相当于求最大后验,通过转化相当于最大似然+先验正规化,对于高斯先验($L_2$范数正则),对于拉普拉斯先验($L_1$范数正则)
但通过最大似然或最大后验学出来的都是权重$w$的定值,那么我们如果想知道$w$的分布应该怎么办呢?
ICML 2015 Weight Uncertainty in Neural Networks这篇论文做了相关的工作
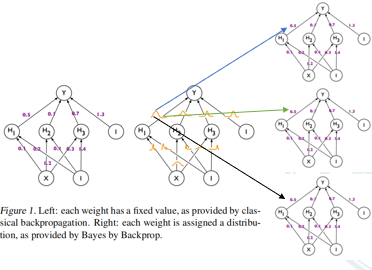
左边的一般的神经网络的权重每次更新后是一个定值,右边的神经网络的权重是一个分布,是一个随机变量
第一个问题:怎么去表示这样的权重?这篇文章的做法是将训练一个网络转化为训练一个网络集合
具体的:文章假设权重符合高斯分布,那么对于每个权重都有一个均值μ和方差σ,然后对这样的分布进行采样,每种采样就对应网络集合中的一个网络,更具体的说就是,前向传播的时候我一个网络架构对每个权重同时进行采样,每种采样都前传一次,然后损失加起来。这个$\sigma$相当于给了模型预测的置信度
第二个问题:这样的直接采样$N(\mu,\sigma)$的话μ和σ都是不可微的
所以引入重参数化trick,具体的就是将采样交给一个标准正态分布$\epsilon$ ~ $N(0,1)$去做,σ就转化为一个正的scale乘上$\epsilon$,μ此时也可看作是一个常量,那么此时的μ和ρ就是可微的了,问题转化为学一个μ和ρ
对于测试集中的数据$\hat x$拔和$\hat y$,预测分布$P(\hat y|\hat x)$就等价于我们刚刚提到的网络集合里 每种权重的后验概率$P(w|D)$ 及 该权重对测试集数据的预测概率$P(\hat y|\hat x)$的 加权,即表示成每种权重的后验概率$P(w|D)$下$P(\hat y|\hat x)$的期望
回顾贝叶斯公式
问题是这个后验很难求,我们不可能对所有可能的$w$的先验$P(w)$和它对应的似然$P(D \mid w)$进行加权,那么这篇文章就提出通过变分近似的方法学一个参数$θ$,并最小化在$θ$下$w$的分布$q(\mathbf{w} \mid \theta)$和$w$在训练集上的后验分布$P(\mathbf{w} \mid \mathcal{D})$的$KL$距离,那么在$θ$参数化下的网络去采样的时候就近似了我们的后验分布$P(\mathbf{w} \mid \mathcal{D})$
转化后的最后的表达式中第一项最小化参数$θ$下$w$的分布$q(\mathbf{w} \mid \theta)$和先验$P(w)$的$KL$距离,第二项尽量大就保证采样出来的$w$可以在训练集上最大似然
当我们的$\theta$定义为μ和ρ的时候,我们就能实现通过优化上述表达式得到权重$w$的后验分布
talk is cheap,show me your code
code
torch版 by Intel Research Lab的大佬
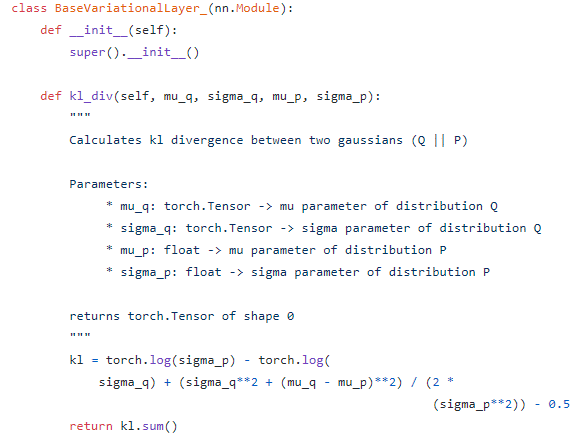
首先实现了一个基础变分层类,里面主要只有一个函数kl_div用来计算两个正态分布的KL散度,这个式子的话是从两个正态分布的对数期望通过简化后的表达式
重参数化卷积的具体实现,
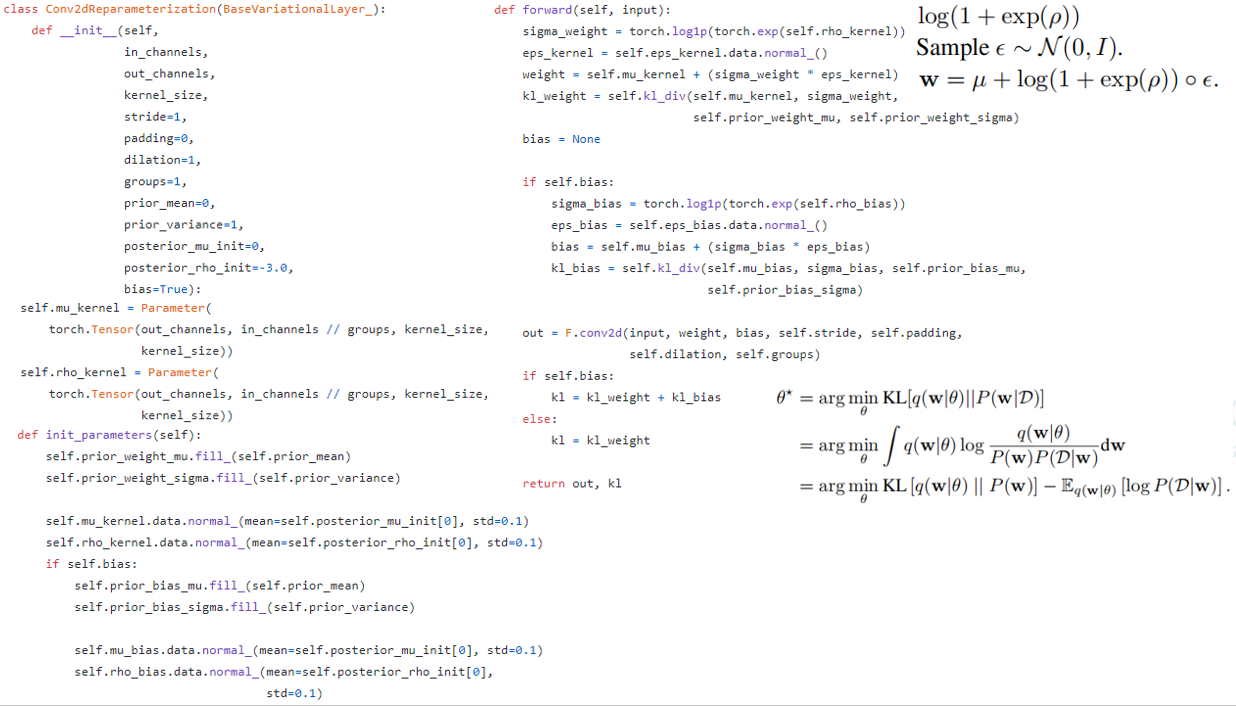
他首先继承了刚刚的基础变分层类,从而可以计算训练集下后验$P(w\mid D)$和参数θ下$q(w|\theta)$的kl散度
首先他根据输入输出的特征层数,卷积核的尺寸定义了我们刚刚那个式子里每个权重的μ和ρ,通过torch.nn的Parameter这个类转化为可学的参数
初始化参数的时候通过输入的先验μ和先验σ初始化先验分布
通过输入的初始后验μ和σ和0.1的标准差初始化θ参数化下的后验μ和后验σ
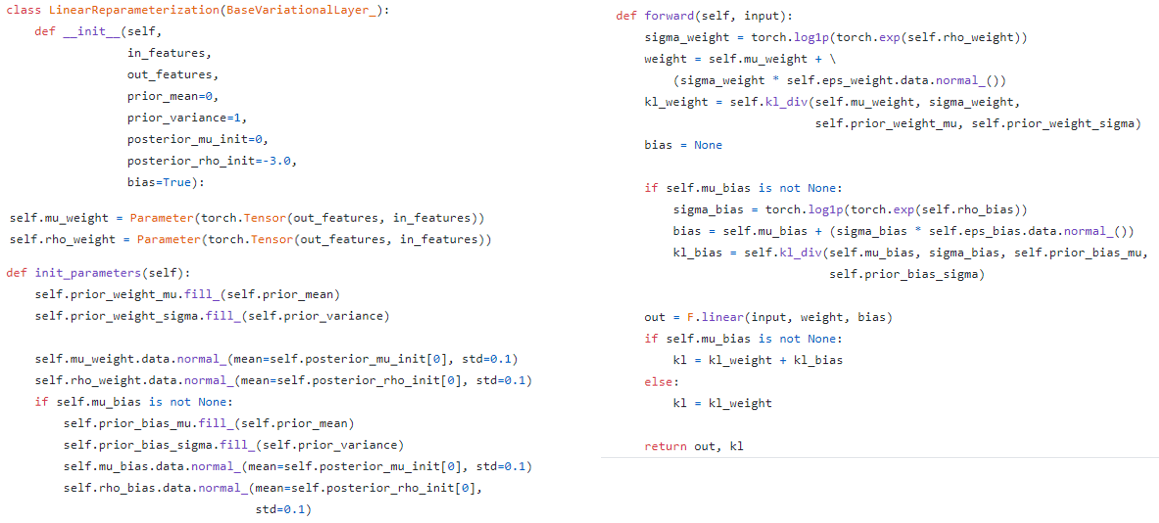
线性层同理
则Resnet的一个BasicBlock的BNN形式如下,在前传的时候将各个Linear和Conv的kl损失累加起来
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_planes, planes, stride=1, option='A'):
super(BasicBlock, self).__init__()
self.conv1 = Conv2dReparameterization(
in_channels=in_planes,
out_channels=planes,
kernel_size=3,
stride=stride,
padding=1,
prior_mean=prior_mu,
prior_variance=prior_sigma,
posterior_mu_init=posterior_mu_init,
posterior_rho_init=posterior_rho_init,
bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = Conv2dReparameterization(
in_channels=planes,
out_channels=planes,
kernel_size=3,
stride=1,
padding=1,
prior_mean=prior_mu,
prior_variance=prior_sigma,
posterior_mu_init=posterior_mu_init,
posterior_rho_init=posterior_rho_init,
bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.shortcut = nn.Sequential()
if stride != 1 or in_planes != planes:
if option == 'A':
"""
For CIFAR10 ResNet paper uses option A.
"""
self.shortcut = LambdaLayer(lambda x: F.pad(
x[:, :, ::2, ::2],
(0, 0, 0, 0, planes // 4, planes // 4), "constant", 0))
elif option == 'B':
self.shortcut = nn.Sequential(
Conv2dReparameterization(
in_channels=in_planes,
out_channels=self.expansion * planes,
kernel_size=1,
stride=stride,
prior_mean=prior_mu,
prior_variance=prior_sigma,
posterior_mu_init=posterior_mu_init,
posterior_rho_init=posterior_rho_init,
bias=False), nn.BatchNorm2d(self.expansion * planes))
def forward(self, x):
kl_sum = 0
out, kl = self.conv1(x)
kl_sum += kl
out = self.bn1(out)
out = F.relu(out)
out, kl = self.conv2(out)
kl_sum += kl
out = self.bn2(out)
out += self.shortcut(x)
out = F.relu(out)
return out, kl_sum训练的时候通过mento carlo采样 kl散度项损失
def train(args, model, device, train_loader, optimizer, epoch, tb_writer=None):
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output_ = []
kl_ = []
for mc_run in range(args.num_mc):
output, kl = model(data)
output_.append(output)
kl_.append(kl)
output = torch.mean(torch.stack(output_), dim=0)
kl = torch.mean(torch.stack(kl_), dim=0)
nll_loss = F.nll_loss(output, target)
#ELBO loss
loss = nll_loss + (kl / args.batch_size)
loss.backward()
optimizer.step()
if batch_idx % args.log_interval == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
if tb_writer is not None:
tb_writer.add_scalar('train/loss', loss.item(), epoch)
tb_writer.flush()


